מתחת לרחובות הסואנים והחזיתות המודרניות של הערים מסתתרות לעיתים “עולמות נשכחים”: רשתות של מנהרות, בונקרים היסטוריים ומעברים תעשייתיים נטושים. למבנים תת־קרקעיים אלו יש ערך היסטורי ואדריכלי משמעותי, והם מציעים פוטנציאל ייחודי לשימור, שימוש חוזר וחידוש. עם זאת, מיפוי מדויק של סביבות מורכבות ומסוכנות אלו מציב אתגר גדול עבור מודדים. פרויקט שבוצע לאחרונה בריגה, לטביה, על ידי אלדיס פיזנס מחברת SIA PP Geodēzija, שותפה מקומית של CHC Navigation, ממחיש כיצד טכנולוגיות חדשניות כמו סורק ה־RS10 SLAM של CHCNAV לא רק מתמודדות עם האתגרים – אלא משנות מן היסוד את הגישה למדידות תת־קרקעיות.
המכשולים המסורתיים במדידות מנהרות ומכרות
במשך עשורים הסתמכו מודדים במנהרות, מכרות ומבנים תת־קרקעיים על שיטות מדידה קלאסיות: תחנות טוטאל, תיאודוליטים, מאזנות ומדידות ידניות. שיטות אלו אמנם מספקות דיוק, אך בתנאים תת־קרקעיים הן דורשות זמן רב, צוותים גדולים והקפדה יתרה כדי לצמצם טעויות אנוש.
הקשיים כוללים:
- תנאים פיזיים מאתגרים: מנהרות צרות, פירי גישה אנכיים ומעברים מורכבים.
- סביבה בעייתית: תאורה חלשה, אבק ותנאים גיאולוגיים מגוונים שמשפיעים על בטיחות ואיכות הנתונים.
- כיסוי מוגבל: לרוב מתקבלות נקודות מדידה בודדות ולא מודל תלת־ממדי רציף – מה שמקשה על ניתוחים ותכנון שיקום.

עליית ה־SLAM: עידן חדש במיפוי תת־קרקעי
טכנולוגיית SLAM (Simultaneous Localization and Mapping) מאפשרת למכשיר לבנות מפה של סביבה לא מוכרת ובמקביל לעקוב אחרי מיקומו המדויק בה. סורקי SLAM ידניים שינו את כללי המשחק: המודד פשוט הולך במנהרה, והמכשיר לוכד מיליוני נקודות ויוצר ענן נקודות תלת־ממדי בזמן אמת.
יתרונות מרכזיים:
- קיצור משמעותי של זמן העבודה בשטח.
- פחות צורך ברשתות בקרה פנימיות מסובכות.
- שיפור הבטיחות – פחות זמן בסביבות מסוכנות.
- כיסוי צפוף ורציף שמאפשר מודלים מדויקים יותר, חישובי נפחים והערכות מבניות.
אתגרים ייחודיים בשימוש ב־SLAM מתחת לאדמה
על אף יתרונותיו, שימוש ב־SLAM במנהרות מציב גם מגבלות:
- סביבות דלות מאפיינים: מנהרות ארוכות וחלקות עלולות לגרום לאובדן מעקב.
- ניהול סוללה: סריקות ממושכות דורשות תכנון – הפסקות להחלפת סוללה עלולות לפגוע ברצף הנתונים.
- תנאי תאורה ירודים: מערכות SLAM מבוססות מצלמות מתקשות בחושך מוחלט.
- כיסוי מלא: ללא משוב בזמן אמת על איכות וכיסוי, קיימת סכנה לפספס אזורים קריטיים.
פרויקט ריגה: מדידת מנהרות נסתרות
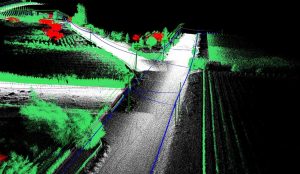
בפרויקט שנערך לאחרונה, התבקש פיזנס למדוד מתחם מפעל ישן בריגה, שכלל רשת מנהרות תת־קרקעיות ובונקר סובייטי. האתר דרש תיעוד מדויק לשימור ותכנון שימוש חוזר.
האתגרים כללו מעברים צרים שחייבו זחילה, חושך מוחלט שנדרש בו תאורה מלאכותית, גיאומטריה מורכבת עם מנהרות מצטלבות, וצורך לקשר את המדידות התת־קרקעיות לרשת הקואורדינטות העילית.

היתרונות של CHCNAV RS10 בפרויקט ריגה
ה־RS10 של CHCNAV נבחר בזכות יתרונותיו:
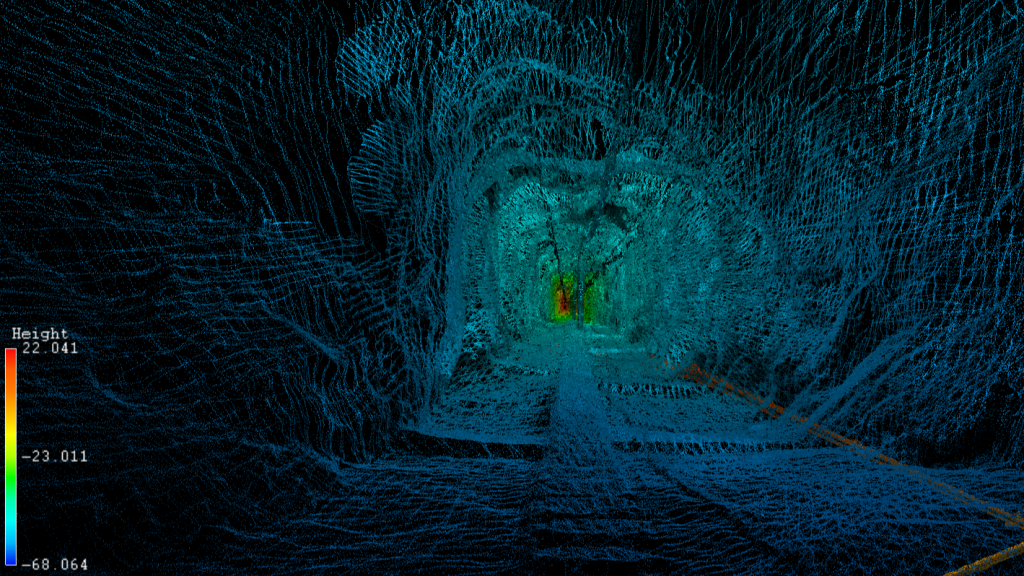
- טכנולוגיית איחוי חיישנים (Sensor Fusion): שילוב של LiDAR מדויק עם שלוש מצלמות HD וחיישני IMU. מאפשר עבודה גם בתנאי תאורה ירודים. בפרויקט בריגה נעשה שימוש בפנסים ידניים בלבד – וה־RS10 שמר על עקיבות מלאה במשך 57 דקות סריקה.
- מעבר חלק בין חוץ לפנים: ה־RS10 מתחיל עם מיקום GNSS מעל הקרקע, עובר ל־SLAM מתחת לאדמה וחוזר להתחבר ל־GNSS ביציאה – ללא צורך בעיבוד מורכב.
- עיבוד בזמן אמת: תוכנת SmartGo סיפקה משוב מיידי על איכות הסריקה וכיסוי השטח – מנעה טעויות וחזרה יקרה לאתר.
- סוללה נשלפת בחום (Hot-Swappable): אפשרה החלפה מיידית ללא כיבוי המכשיר או אובדן נתונים.
- דיוק גבוה: דיוק של פחות מ־5 ס”מ – קריטי לתכנון, ניתוח עובי קירות והערכת יציבות מבנים.
כפי שתיאר פיזנס:
“התחלתי את המדידה עם קואורדינטות GNSS, ירדתי למנהרות, וה־RS10 לא איבד את האלגוריתם אפילו לרגע. בסיום, חזרתי לפני השטח והמכשיר התחבר שוב ל־GNSS באופן מיידי.”
גישה מעשית לתיעוד תת־קרקעי
פרויקט ריגה מדגים כיצד ה־RS10 של CHCNAV נותן מענה מעשי לאתגרים ייחודיים: סביבה חשוכה, גיאומטריה מורכבת, צורך בקישור בין מדידות עיליות ותת־קרקעיות. המערכת אפשרה איסוף נתונים רציף, בטוח ואמין – תוך חיסכון בזמן וצמצום סיכונים.
בעולם שבו ערים מבקשות להחזיר לעצמן את החללים הנסתרים, טכנולוגיות חדשניות כמו סורקי SLAM ידניים בשילוב GNSS RTK פותחות הזדמנויות חדשות לשימור, לתכנון ולהתחדשות עירונית.