הקדמה למיפוי נייד: לכידת נתונים גיאו-מרחביים במהירות ובדיוק
מערכות מיפוי נייד (MMS) מסמנות התקדמות משמעותית באופן שבו נתונים גיאו-מרחביים נאספים ומיושמים. פלטפורמות אלו משלבות טכנולוגיות כמו LiDAR, GNSS, יחידות מדידה אינרציאליות (IMU) ומצלמות ברזולוציה גבוהה בתוך מערכת אחת המסוגלת לאסוף מידע מרחבי צפוף — תוך כדי תנועה. בניגוד לשיטות מדידה מסורתיות הלוכדות נקודות בודדות, MMS מייצרות מערכי נתונים רציפים המייצגים את הסביבה הפיזית בפירוט גבוה יותר ובמהירות גדולה בהרבה.
האימוץ ההולך וגובר של מיפוי נייד נובע מהצורך בנתונים גיאו-מרחביים מדויקים, מקיפים וזמינים בזמן אמת — במיוחד עבור פיתוח ערים חכמות, ניהול תשתיות ויישומי BIM. שיטות מסורתיות לרוב דורשות כוח אדם רב, זמן עבודה ארוך, ומוגבלות בכמות ובאיכות המידע שהן מסוגלות לתפוס. לעומת זאת, משימת מיפוי נייד אחת יכולה לאסוף נתונים המקבילים לשבועות של מדידה סטטית — ובכך לייעל תהליכים, לחסוך משאבים ולצמצם עלויות תפעול.
התקדמות ברזולוציית LiDAR, בדיוק GNSS וביכולות SLAM הופכת את המיפוי הנייד למדויק ואמין יותר מאי-פעם. מערכות מתקדמות מסוגלות לאסוף מיליוני נקודות תלת־ממד בשנייה בדיוק תת-סנטימטרי ולשמור על מיקום יציב גם בסביבות עם נראות לוויינית מוגבלת. התפתחויות אלו מציבות את מערכות המיפוי הנייד כגורם מרכזי בתכנון תשתיות מבוסס-נתונים ובמודיעין גיאו-מרחבי.

מהכביש אל המציאות: תהליך העבודה של מערכת מיפוי נייד
שלב ראשון: תכנון משימה והכנת המערכת
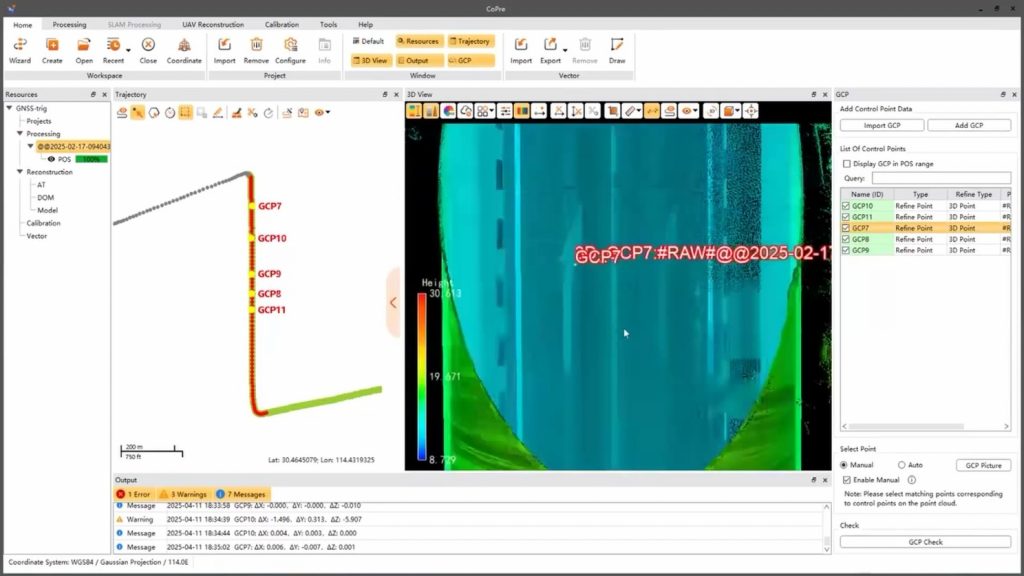
תהליך המיפוי מתחיל הרבה לפני ההגעה לשטח. בשלב התכנון משתמשים צוותי הסקר בתוכנות ייעודיות להגדרת גבולות הפרויקט, אופטימיזציית מסלולי נסיעה וקביעת מיקומי נקודות בקרה (GCP). שלב זה מבטיח כיסוי נתונים יעיל ותומך בייחוס גיאוגרפי מדויק.
לאחר מכן מתבצעת הכנת המערכת — התקנת ה-MMS על הרכב, כיול החיישנים וביצוע בדיקות סנכרון ואבחון. שלב מקדים זה חיוני להבטחת תוצאות אמינות בשטח.
שלב שני: איסוף נתונים בצפיפות גבוהה — תוך כדי תנועה
בזמן איסוף הנתונים, הרכב נוסע לאורך מסלולים מוגדרים במהירות מבוקרת (בדרך כלל בין 20 ל-60 קמ״ש) על מנת להבטיח צפיפות נתונים מספקת. מערכת ה-AU20 של CHCNAV, לדוגמה, כוללת שני חיישני LiDAR המסוגלים לאסוף עד שני מיליון נקודות בשנייה, תוך כיסוי רחב של הכביש וסביבתו.
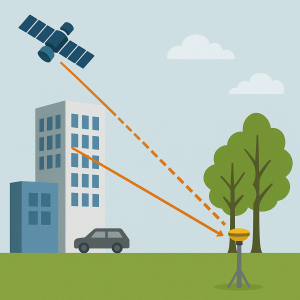
במקביל, מערכת GNSS/IMU משולבת מתעדת את מיקום הרכב ואת הכיוונים (Yaw, Pitch, Roll) שלו, ומייצרת מסלול מדויק. מצלמות פנורמיות ברזולוציה גבוהה מתעדות תמונות המאפשרות לצבוע את הענן בצבעים מציאותיים בשלב העיבוד. כל זרמי הנתונים מסונכרנים ומוטבעים בחותמות זמן לצורך עיבוד עתידי.
הרחבת הכיסוי: מיפוי מבוסס SLAM לאזורים לא נגישים
באזורים שבהם רכב לא יכול לפעול — כגון סמטאות צרות, שבילי הולכי רגל או אזורי מגבלות תנועה — ניתן לבצע מיפוי באמצעות מערכות נישאות. סורק ה-RS10 של CHCNAV מאפשר למפעילים למפות תוך כדי הליכה, באמצעות טכנולוגיית SLAM השומרת על מיקום מדויק גם ללא אות GNSS.
מערכת AU20 יכולה להיות מותאמת גם לנשיאה על הגב (Backpack), ובכך מספקת דיוק של מערכת רכב גם במרחבים מוגבלי גישה. גישה היברידית זו מבטיחה כיסוי מרחבי מלא ומשפרת את איכות הנתונים הכוללת באמצעות מיזוג מסלולים.
עיבוד יעיל: הפיכת נתוני שדה לתובנות ישימות
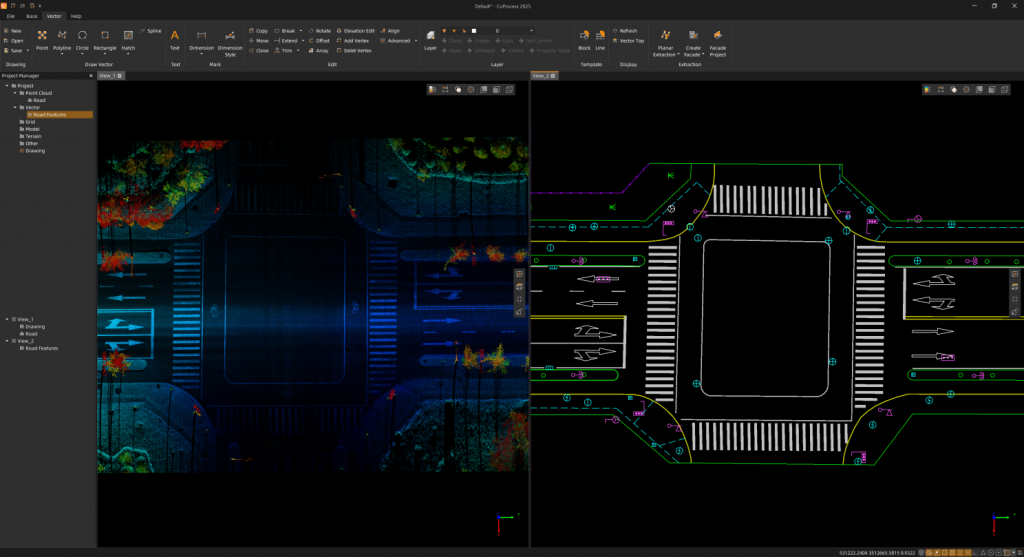
כלי התוכנה המשולבים של CHCNAV מייעלים את המעבר מנתוני גלם לתוצרים סופיים. פלטפורמות CoPre ו-CoProcess כוללות ניקוי ענני נקודות באמצעות בינה מלאכותית, חילוץ אוטומטי של אובייקטים, וצבעון תמונות פנורמיות — כל זאת לצמצום זמן עיבוד ועומס ידני.
מערכת תוכנה זו מאפשרת תזרימי עבודה מהירים ליישומים כמו מיפוי נכסי כבישים, מיפוי מסדרונות תשתית, ומידול תלת-ממד של ערים. שילוב של איסוף נתונים מתקדם עם עיבוד אוטומטי מצמצם משמעותית את הזמן בין העבודה בשטח לבין אספקת התוצרים.
מבט לעתיד: תפקיד מערכות מיפוי נייד באיסוף נתוני גיאו-מרחב
מיפוי נייד הפך לטכנולוגיה בסיסית באיסוף מידע גיאו-מרחבי. מערכות מיפוי כמו CHCNAV AU20 MMS מספקות גמישות לפעול במגוון סביבות — תוך שמירה על הדיוק הנדרש ליישומי הנדסה ומדידה מקצועיים.
בשילוב סביבת תוכנה יעילה, מערכות אלה תומכות בשרשרת העבודה המלאה — מתכנון, דרך איסוף וניתוח, ועד להגשת תוצרים סופיים. לארגונים בתחום התחבורה, פיתוח עירוני או תחזוקת תשתיות — אימוץ טכנולוגיות מיפוי נייד יוצר נתיב ברור לשיפור יעילות, איכות נתונים ותובנות תפעוליות.
הבנה ויישום של כלים אלו הופכים לחשובים יותר ויותר בעידן שבו מודעות מרחבית מהווה בסיס לקבלת החלטות נכונה ויעילה בתחומים רבים.