התפתחות טכנולוגיות GNSS, SLAM ו-LiDAR במדידות גיאודטיות

החתירה לדיוק במידע גיאו-מרחבי הובילה להתקדמות בטכנולוגיות מיפוי ומיקום, כולל מערכות ניווט לווייניות גלובליות (GNSS), חישה מרחוק באמצעות לייזר (LiDAR) ומיקום ומיפוי סימולטני (SLAM).
GNSS, הנשען על מערכות לוויין כגון GPS (ארה”ב), GLONASS (רוסיה), Galileo (האיחוד האירופי) ו-BeiDou (סין), חולל מהפכה בדיוק המיקום עם כניסת שיטת ה-RTK (Real-Time Kinematic) בשנות ה-90. תיקוני RTK שיפרו באופן דרמטי את הדיוק, הפחיתו את שגיאות ה-GNSS ממטרים לסנטימטרים, ואיפשרו קביעת מיקום מדויקת בזמן אמת.
במקביל, טכנולוגיית LiDAR הפכה לכלי חישה מרחוק מתקדם, המשתמש בפולסים של לייזר כדי ליצור ענני נקודות ברזולוציה גבוהה. יכולתו ללכוד פרטים טופוגרפיים מורכבים הפכה אותו לכלי הכרחי במדידות גיאודטיות, בדיקות תשתיות וניהול יערות.
SLAM מוסיף ממד חדש למדידות
SLAM, שפותח במקור עבור רובוטיקה, מאפשר למכשירים למפות ולנווט בסביבות לא מוכרות בזמן אמת. התפתחויות בתחום החיישנים והמחשוב הרחיבו את השימוש ב-SLAM לכלי טיס בלתי מאוישים, ניווט אוטונומי ודגמים תלת-ממדיים.
כיום, שילוב של טכנולוגיות אלו משנה את זרימת העבודה במדידות. פתרונות כמו ה-RS10 של CHCNAV מאחדים את הדיוק האבסולוטי של GNSS RTK, את יכולות המיפוי הדינמיות של SLAM ואת איסוף הנתונים העשיר של LiDAR.
ראיון עם ביירון יואן, מנהל מיפוי תלת-ממדי נייד ב-CHCNAV: החזון מאחורי RS10
ביירון יואן, מנהל תחום פתרונות מיפוי תלת-ממדי ניידים ב-CHC Navigation, מספק תובנות על מערכת ה-RS10 החדשנית – מערכת פורצת דרך המשלבת טכנולוגיות GNSS ו-SLAM. בראיון זה הוא מסביר על התפתחות המערכת, מאפייניה הייחודיים והפוטנציאל העתידי שלה. הוא גם מציין כיצד ה-RS10 פותר אתגרים מרכזיים בתחום המדידות ומגדיר מחדש את הסטנדרטים של הדיוק והיעילות בענף.
מהו RS10, וכיצד הוא שונה מפתרונות GNSS מסורתיים?
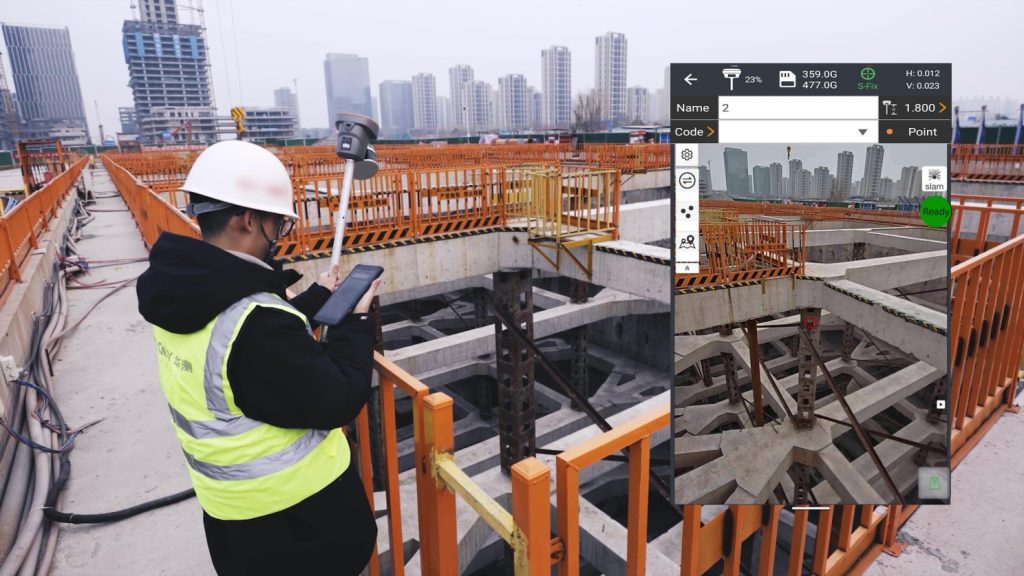
ה-RS10 הוא מערכת מיפוי תלת-ממדית ניידת, המשלבת GNSS RTK, SLAM ו-LiDAR בפתרון קומפקטי ונייד. בניגוד למכשירי GNSS מסורתיים הנשענים אך ורק על אותות לוויין לצורך קביעת מיקום, ה-RS10 משתמש בטכנולוגיית SLAM לשמירה על דיוק גם באזורים עם קליטת לוויין מוגבלת או לא קיימת, כגון יערות, ערים צפופות או חללים תת-קרקעיים.
שילוב טכנולוגיות זה מאפשר מיפוי תלת-ממדי ומיקום אמין בזמן אמת, מה שהופך את ה-RS10 לכלי אידיאלי עבור מגוון רחב של יישומים, כולל מדידות אתרי בנייה ובדיקות תשתיות.
מהי טכנולוגיית SLAM וכיצד היא משתלבת עם GNSS RTK ב-RS10?
ביירון יואן: SLAM (Simultaneous Localization and Mapping) היא טכנולוגיה המשתמשת בחיישנים כגון מצלמות, LiDAR ומערכות ניווט אינרציאליות (INS) כדי לצפות ולפרש את הסביבה תוך כדי יצירת מפה בו-זמנית. היא ממלאת תפקיד מרכזי במיפוי, מידול תלת-ממדי וניווט אוטונומי, כולל הימנעות ממכשולים ברובוטיקה ובכטב”מים.
ב-RS10, אנו נוקטים גישה ייחודית באמצעות שילוב עמוק של מדידות SLAM גולמיות עם GNSS RTK. במקום פשוט לשלב את התוצרים הסופיים של SLAM ו-GNSS, אנו משלבים את הנתונים ברמה עמוקה יותר. המערכת משתמשת באלגוריתם אדפטיבי שמתאים את משקל הנתונים של SLAM ו-RTK בהתאם לתנאי הסביבה, כדי להבטיח דיוק מקסימלי במיקום ובמיפוי.
מהם היתרונות של שילוב טכנולוגיות אלו?
ביירון יואן: ה-RS10 מנצל את היתרונות של מקלטי GNSS וסורקי SLAM עצמאיים, תוך שהוא מציע יתרונות משמעותיים על פני כל אחד מהם בנפרד.
מערכות GNSS סובלות משגיאות הנגרמות מהפרעות באותות, כמו עצים, מבנים וטופוגרפיה מורכבת. RS10 מתמודד עם בעיה זו באמצעות SLAM, אשר מספק נתוני מיקום יציבים באזורים שבהם אותות GNSS חלשים או אינם קיימים, ומשפר את היעילות והאמינות במדידות יומיות.
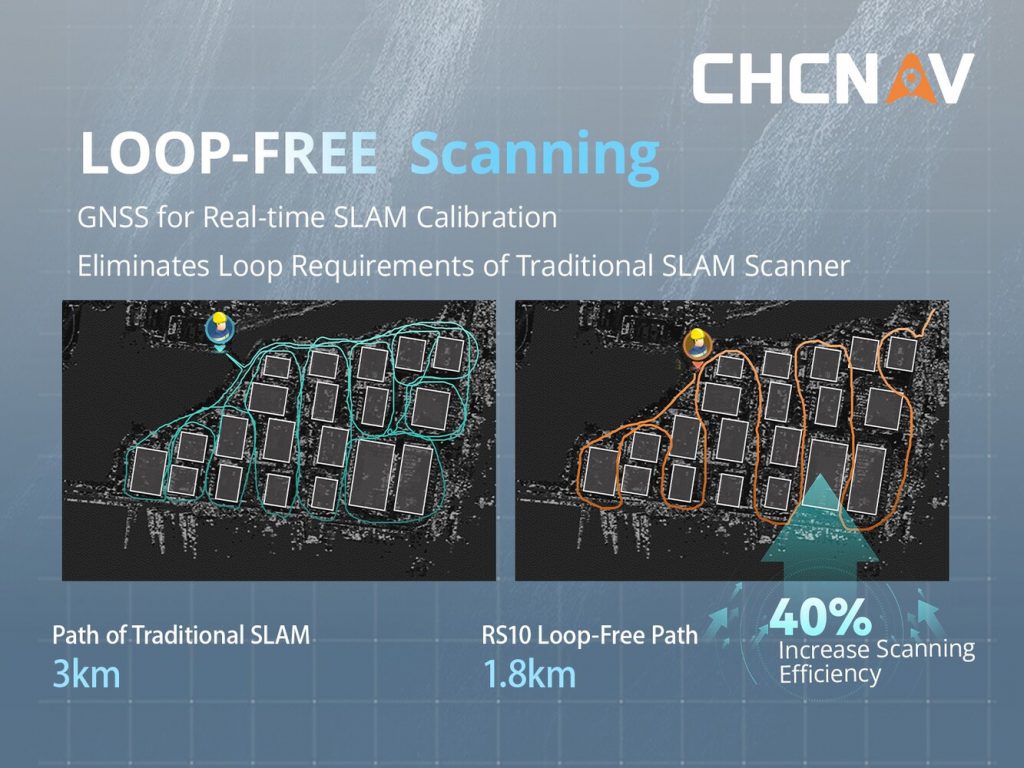
מצד שני, סורקי SLAM עצמאיים נוטים לצבור שגיאות הצטברותיות (drift), מה שפוגע בדיוק המיפוי. לרוב, הם דורשים נקודות בקרה חיצוניות כדי לתקן את השגיאות הללו. ה-RS10 פותר בעיה זו על ידי שימוש ב-GNSS RTK כנקודת ייחוס בזמן אמת לתיקון שגיאות הצטברותיות, מה שמפחית את הצורך בעיבוד נתונים ממושך לאחר המדידה.
מה היו האתגרים המרכזיים בפיתוח ה-RS10?
ביירון יואן: האתגר הגדול ביותר היה להגיע לדיוק המדידה הגבוה שהצבנו לעצמנו – דיוק מוחלט של 5 ס”מ ודיוק יחסי של 1 ס”מ בכל תרחיש.
כחצי שנה לאחר תחילת הפרויקט, לא היה ברור אם היעדים הללו ברי השגה. כדי להתגבר על כך, אימצנו גישה אג’ילית לפיתוח, בדומה למתודולוגיות של SpaceX, עם ניסויים ומבחנים מחזוריים על אבי-טיפוס.
אילו תכונות עיקריות של ה-RS10 הכי מרגשות אותך?
ביירון יואן: שתי תכונות חדשניות במיוחד הן SFix ו-Vi-LiDAR, אשר משנות לחלוטין את הגישה המסורתית למיקום ומדידה ללא מגע.
- SFix מאפשר דיוק של עד 5 ס”מ בתוך דקה אחת, גם באזורים עם אות GNSS חלש או מופרע.
- Vi-LiDAR מאפשר למודדים ללכוד תמונת סביבה ולבחור נקודות מדידה ישירות על המסך, ללא צורך בכיוון ידני מדויק, מה שמשפר את האמינות והיעילות.
מהו כיוון ההתפתחות העתידי של מוצרים כמו ה-RS10?
ביירון יואן: טכנולוגיית SLAM צפויה להחליף כלים מסורתיים כמו תחנות טופוגרפיות ומקלטי GNSS RTK בעוד תרחישים רבים. אנו צופים שיפורים משמעותיים באלגוריתמים של SLAM, שיגבירו את הדיוק והיציבות.
בעתיד, שילוב SLAM עם טכנולוגיות הדמיה תלת-ממדית יאפשר יצירת תאומים דיגיטליים מציאותיים במיוחד, שישמשו בענפים כמו הנדסה אזרחית, תכנון ערים ומציאות מדומה, ויפתחו אפשרויות חדשות לחדשנות ולייעול תהליכים.
מסקנות
ה-RS10 מייצג את המחויבות של CHC Navigation לפריצת גבולות הטכנולוגיה הגיאו-מרחבית באמצעות שילוב מתקדם של GNSS, SLAM ו-LiDAR. כפי שציין ביירון יואן, חדשנויות כמו SFix ו-Vi-LiDAR מספקות פתרונות מדויקים באתגרים סביבתיים שונים, ומשנות את אופן ביצוע המדידות.